Po pierwsze standartowym i moim ulubionym sposobem na zakończenie synchronizacji jest użycie ArriveMFD , który oblicza opóźnienie wymagane w danej odległości od celu (również bazy), aby zatrzymać się blisko niego z zerową prędkością względną. Zaznaczam, że ArriveMFD oblicza to opóźnienie przez cały czas, przez co wszelkie błędy wynikające ze źle przyjętych założeń mogą być przez pilota na bieżąco korygowane przez zwiększenie/zmniejszenie opóźnienia. Niestety ArriveMFD posiada błąd graficzny, powodujący przeładowanie symulatora, co powoduje konieczność zrestrtowania go po uzyciu tego MFD. Skłoniło mnie to do poszukania alternatywnych sposobów precyzyjnych zakończeń synchronizacji. (UPDATE - blad ten wystepowal w wersji Orbitera 2005. W 2006 już go nie zauwazylem.)
Oto pierwszy pomysł Phila Hubbarda z forum m6:
Jeśli podlatujesz do punktu przecięcia z bardzo wysoka (bardzo eliptyczna orbita), to w momencie gdy będziesz blisko stacji, będziesz miał dużą prędkość względną. Aby uprościć sobie życie, możesz dodać sobie następną orbitkę aby zmniejszyć tą prędkość. Powiedzmy że okres twojej orbity wynosi 15 000 sekund a okres orbity twojego celu wynosi 5 500 sekund (ISS). Zamiast synchronizacji co do setnej sekundy, użyj Synch MFD aby umieścić się w punkcie przecięcia 300 sekund PRZED celem. Następnie, gdy wykonasz to N orbit i będziesz w punkcie przeciecia o tym czasie, zsynchronizuj orbity, tak abyś spotkał się z celem na nastepnej orbicie (ustal okres orbity na 5 800 sekund). Jeśli tak zrobisz, będziesz miał znacznie mniejszą prędkość względną ze swoim celem kiedy dojdzie do rzeczywistego spotkania ze stacją.
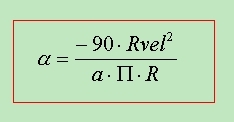
Jeśli nie możesz lub nie chcesz sobie pozwolić na dodatkową orbitę i co ważne - twoja orbita nie jest bardzo eliptyczna to możesz skorzystać z gotowego wzoru który zawiera Equation MFD. Jest on w dziale ,,MOV" MFD'ku i wygląda następująco:
Wzór można zastosować do statków o małych przyspieszeniach, czyli statków realistycznych, lecz podaje za mały wynik, jeśli twoja orbita jest bardzo eliptyczna, a wogóle nie polecam go stosować do obiektów docelowych o eliptycznych orbitach, w obydwu przypadkach z powodu zmiennych predkości obiektów na takich orbitach. Jeśli jednak dokujesz do ISS/Mira to jedynym problemem jest zmienna skladowa przyspieszenia, wynikającego z podchodzenia twojego statku do perycentrum. Na problem ten istnieje nastepujący sposób:
Jeśli do równania wstawisz przyspieszenie/opóźnienie mniejsze niż w danej chwili maksymalne, to będziesz miał ,,troche przyspieszenia" w rezerwie, tzn. będziesz mógł je nie tylko zmniejszyć przy końcu manewru, gdy zauważysz że zwalniasz w zbyt dużym tempie, lecz będziesz mógł je również zwiększyć, gdy zauważysz że zwalniasz w zbyt małym tempie.
Mała uwaga - wzór można też stosować do hamowania przy podlatywaniu do bazy na ciele bez atmosfery, tylko że zamiast dV wstawiamy naszą prędkość w stosunku do powierzchni, czyli tą którą podaje HUD w trybie Powierzchniowym. Mozna go rowniez stosowac do przechwycen malych ksiezycy jak np Deimos, Fobos, o czym za niedlugo w przewodniku o TransX'ie
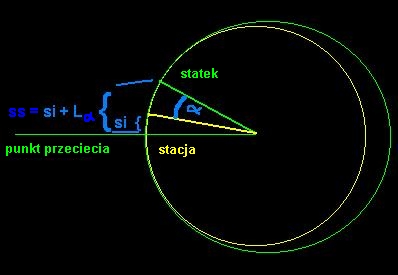
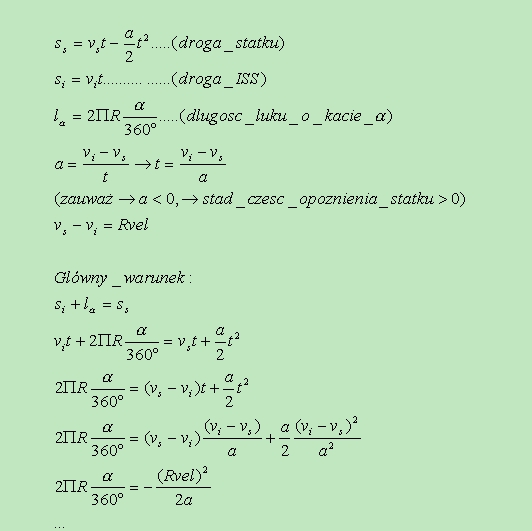
Nim zorientowałem się że równanie to istnieje w juz w Equation MFD, wyprowadziłem wzór na kąt między statkiem a stacją przy którym należy zacząć spowalniać aby dokonać tego samego co wyżej. Zamieszczam go tutaj w zasadzie jako eksponat i dowód, że mam dużo wolnego czasu :)
Jeśli jesteś zainteresowany wyprowadzeniem mojego wzoru to jest ono TUTAJ
{kind=link}